Исследование
алгоритмов предварительной обработки данных траекторных измерений методами
имитационного моделирования
Стубарев Денис Викторович,
аспирант Сибирского
государственного ордена Трудового Красного Знамени научно-исследовательского
института метрологии,
руководитель
структурного подразделения ООО «ФБ Консалт».
Целью работы является проведение анализа имеющихся
методов и средств предварительной обработки результатов траекторных измерений,
подбор алгоритма оптимального оценивания данных на этапе первичной обработки
информации и составление рекомендаций по его использованию для получения результата,
максимально приближенного к реальному.
В данной работе предварительная обработка проводилась
с помощью робастных алгоритмов фильтрации, которые нечувствительны к выбросам в
данных, обеспечивают гладкое восполнение пропущенных данных и позволяют
идентифицировать скачки фазовой неоднозначности в фазовых измерениях.
Основу координатно-временных
определений, выполняемых по сигналам спутниковых навигационных систем ГЛОНАСС и
GPS, составляют результаты текущих измерений наклонных
дальностей от навигационных спутников (НС) до антенны приемной аппаратуры
(траекторных измерений). Такие измерения производятся сетью беззапросных
измерительных станций (БИС) для целей восстановления орбит НС и последующего формирования
эфемеридно-временного обеспечения ГЛОНАСС, или комплектом приемной аппаратуры
при решении геодезических и навигационных задач по сигналам радиовидимой
орбитальной группировки НС [1].
Существует ряд задач, в которых
отбрасывать ошибочные измерения нельзя. К таким задачам относятся:
синхронизация разнесенных в пространстве часов (такие часы, входят в состав
беззапросных измерительных станций (БИС), которые используются для уточнения
(ЭВО), управление разнесенными в пространстве объектами. И задачи, обеспечивающие
функционирование самих спутниковых навигационных систем (СНС).
обслуживание приборов учета тепла. Низкие цены ekstralab.ru
Исходным материалом для решения задач определения
координат тела в околоземном и наземном пространстве являются результаты
высокоточных измерений наклонных геометрических дальностей от навигационного
спутника (НС) до измерительной станции.
Уравнение для геометрической дальности:
где ![]() – геометрическая
наклонная дальность;
– геометрическая
наклонная дальность;
![]() – вектор текущих
координат НС (
– вектор текущих
координат НС (![]() ,
,![]() ,
,![]() ), определенный в системе координат ЕГСК;
), определенный в системе координат ЕГСК;
![]() – вектор текущих
координат потребителя (
– вектор текущих
координат потребителя (![]() ,
,![]() ,
,![]() ), определенный системе координат ЕГСК.
), определенный системе координат ЕГСК.
Начало единой геоцентрической системы координат (ЕГСК)
- в центре масс Земли. Ось Ze направлена в сторону Северного полюса и проходит
через Международное условное начало (МУН) 1900-
Измерение указанных наклонных дальностей
радиотехническими методами сводится к определению длительности интервала
времени, необходимого для прохождения навигационного сигнала от НС до приемной
антенны потребителя. Этот измеренный временной интервал ![]() , выраженный в единицах длины и именуемый в дальнейшем псевдодальностью,
связан с геометрической наклонной дальностью (1) уравнением измерений:
, выраженный в единицах длины и именуемый в дальнейшем псевдодальностью,
связан с геометрической наклонной дальностью (1) уравнением измерений:
где ![]() – псевдодальность.
Измеренный интервал времени прохождения навигационного сигнала от НС до БИС,
выраженный в единицах длины;
– псевдодальность.
Измеренный интервал времени прохождения навигационного сигнала от НС до БИС,
выраженный в единицах длины;
 – группа факторов,
влияющих на точность измерений;
– группа факторов,
влияющих на точность измерений;
![]() – возмущения
стохастической природы, не поддающиеся компенсации.
– возмущения
стохастической природы, не поддающиеся компенсации.
Согласно [1], ошибочными
являются примерно 15% всех измерений, а в городских условиях до 30%.
Существует несколько источников ошибок измерений и
источников ошибок определения интересующих параметров. Эти источники ошибок, в
уравнении (2) представлены в виде факторов, влияющих на точность
измерений. Принято разделять их на источники ошибок, вызванные работой
аппаратуры, на источники ошибок, связанные с влиянием внешней среды и влиянием
ошибок исходных данных, то есть в данном случае, с ошибками координат спутников
[1].
Большую часть факторов, влияющих на точность
траекторных измерений, можно скомпенсировать на основе применения известных
математических моделей для этих поправок. Частично параметры этих согласующих
моделей содержатся в составе навигационного сообщения (для каждого НС
передаются поправки на уходы бортовых часов, для GPS – параметры модели ионосферной задержки) и могут быть
измерены (метеопараметры для расчета тропосферной задержки) [4].
Однако остаются факторы, не поддающиеся компенсации.
Проведенный анализ, что наиболее существенными
факторами, искажающими результаты траекторных измерений, являются (Рисунок 1):
-
выбросы,
образующиеся, в результатах псевдодальномерных измерений, в результате многопутности.
То есть когда сигнал от НС отражается от различных объектов (дома, деревья,
конструкции,…). На рисунке 1.б, выбросы показаны на отчетах 102 и 134, на
рисунке 1.а. выбросы не указаны в связи с их малым размером;
-
разрывы в данных,
образующиеся в результате удаления пачки выбросов, или при потере
синхронизации. В этом случае для исключения разрыва применяется метод гладкого
восполнения данных. На рисунке 1, разрыв в данных показан на интервале отчетов
298-349;
-
для фазовых
измерений, скачки фазы, образующиеся в результате потери синхронизации и возобновление
последующих измерений. Чтобы сохранить возможность использования фазовых
измерений необходимо этот скачек идентифицировать (определить момент
возникновения скачка и его амплитуду) и ввести соответствующую компенсирующую
поправку в фазовые измерения.
Перечисленные обстоятельства приводят
к необходимости проведения предварительной обработки результатов траекторных
измерений с целью:
-
исключения
выбросов из состава данных и замена их значениями удовлетворяющих условиям
гладкости траектории, для кодовых измерений;
-
гладкого
восполнения пропущенных данных при потерях синхронизации;
-
оценивания и
компенсации скачков фазовой неоднозначности в фазовых измерениях.
Для этой цели автором разработаны и применяются рекуррентные
процедуры (на основе рекуррентных процедур оптимальной фильтрации калмановского
типа), адаптирующиеся к измерительной информации.
Поскольку погрешности измерений наклонной дальности и
выбросы в результатах измерений, возникающие вследствие многопутности, малы ![]() по сравнению с самими
дальностями
по сравнению с самими
дальностями ![]() (Рисунок 1.а), для
обработки измерений следует ввести в рассмотрение опорную траекторию достаточно
близкую к реальной траектории спутника, и анализировать относительное движение
НС [2].
(Рисунок 1.а), для
обработки измерений следует ввести в рассмотрение опорную траекторию достаточно
близкую к реальной траектории спутника, и анализировать относительное движение
НС [2].
В работе предлагается в качестве опорной траектории
использовать траекторию полученную с помощью эфемерид поступающих по каждому НС
в составе навигационного сигнала и последующего гладкого восполнения функции с
помощью полиномов Чебышева по методике изложенной в [4]. При этом и отсутствие данных ![]() в моменты нарушения
синхронизации для
в моменты нарушения
синхронизации для ![]() также будут
трактоваться как выбросы или пачка выбросов.
также будут
трактоваться как выбросы или пачка выбросов.
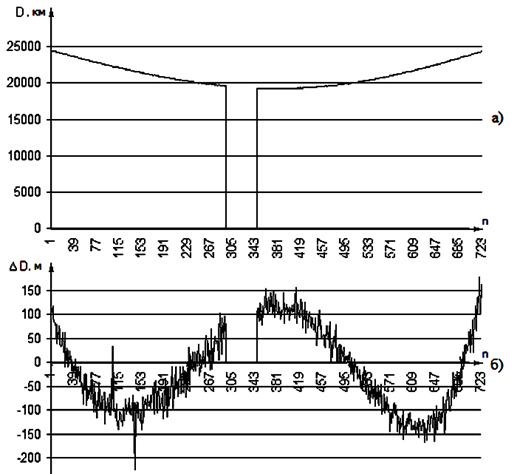
Рис. 1. Изменение дальности а) абсолютное ![]() и б) относительно
опорной траектории
и б) относительно
опорной траектории ![]() .
.
На рисунке 1 на горизонтальной оси представлены отчеты
с интервалом в 30 секунд.
Возможность расчета опорной траектории движения
спутника, позволяет рассчитать функцию опорной дальности ![]() . В дальнейшем, в работе, будут рассматриваться относительные
дальности
. В дальнейшем, в работе, будут рассматриваться относительные
дальности ![]() , т.е. разности между измеренной текущей дальностью до
спутника
, т.е. разности между измеренной текущей дальностью до
спутника ![]() и расчетной дальностью
и расчетной дальностью ![]() (Рисунок 1.б).
(Рисунок 1.б).
Расчетная дальность ![]() получена с помощью
программного имитатора, при действии в канале измерения помехи с СКО=10 м.
получена с помощью
программного имитатора, при действии в канале измерения помехи с СКО=10 м.
Для перехода к относительным дальностям добавляем в
обе части уравнения (2) расчетную дальность:

где ![]() – текущие координаты
спутника на опорной траектории, полученные расчетным путем.
– текущие координаты
спутника на опорной траектории, полученные расчетным путем.
Вопросам выявления и исключения аномальных значений
посвящено большое количество работ (см. например обзоры [3, 5]), однако в них
практически не содержится конструктивных рекомендаций по применению конкретных
методов в рассматриваемых случаях.
Ключевой задачей данной работы
является сравнительный анализ ряда подходов к обнаружению аномальных наблюдений
и уменьшению их влияния на результат измерений, а также выбор наиболее приемлемых
статистических процедур для практики обнаружения сомнительных наблюдений в
измеренных данных.
Следуя [3, 5], наиболее
приемлемыми являются два подхода к обнаружению выбросов в результатах
наблюдений:
-
подход,
основанный на линейной теории оценивания с использованием адаптивной рекуррентной
процедуры калмановской фильтрации;
-
использование
робастных процедур и медианной фильтрации.
Метод оценивания состояния динамических систем с
использованием фильтра Калмана (ФК) получил широкое распространение в практике
статистической обработки траекторных измерений. Это объясняется тем, что
алгоритм калмановской фильтрации имеет рекуррентную форму, удобную для
реализации на ЭВМ, и обеспечивает определение оценок с минимальными дисперсиями
среди всех линейных оценок.
Уравнение фильтра Калмана:
где  ;
;
![]() – вектор оценок
навигационных параметров спутника;
– вектор оценок
навигационных параметров спутника;
H – единичная матрица ![]() ;
;
K – матрица коэффициентов алгоритма оценивания;
![]() – подготовленный
вектор радионавигационных параметров, полученный путем разности относительных
дальностей
– подготовленный
вектор радионавигационных параметров, полученный путем разности относительных
дальностей ![]() , и суммы компенсирующих поправок
, и суммы компенсирующих поправок  :
:  .
.
При использовании данного метода, вычисление оценки
выполняется с опорой на предыдущее значение, и в случае появления в выборке
аномального значения, соответствующая ему оценка несет за собой ошибку и в
следующие вычисления, существенно снижая эффективность фильтрации.
Именно поэтому использование алгоритма калмановской
фильтрации в чистом виде не приносит ожидаемых результатов. Для исключения
подобного эффекта необходимо заведомо исключить из выборки аномальные значения,
и только после этого использовать вышеизложенную процедуру. Другими словами,
перед использованием процедуры калмановской фильтрации, есть необходимость в ее
адаптации, под случай присутствия выбросов.
Для устранения данной проблемы введем доверительный
интервал:
где σ – значение дисперсии.
Все значения, попадающие в указанный промежуток, будем
считать достоверными, а те, которые не попали – исключать, для этого в
уравнении (4) обнуляем матрицу K, и в качестве оценки используется сам прогноз.
В случае прихода пачки выбросов ошибка фильтрации,
связанная с обнулением матрицы К накапливается, с каждым новым выбросом
уводя оценку все дальше и дальше за доверительный интервал (Рисунок 2).
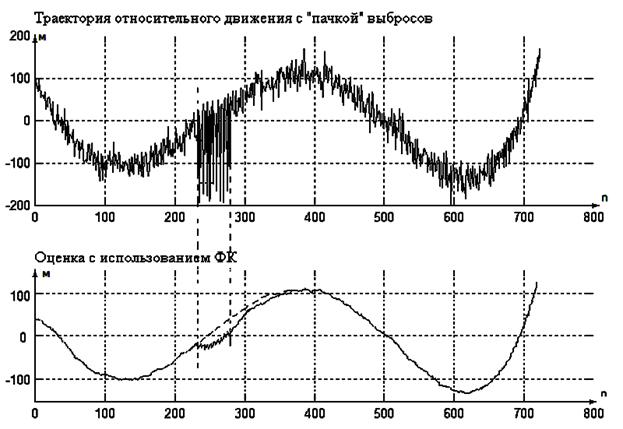
Рис. 2. Использование ФК в условиях действия
пачки выбросов.
Таким образом, можно прийти к выводу, что перед
использованием адаптивной процедуры калмановской фильтрации желательно
произвести проверку измерений на наличие аномальных значений, и по возможности
произвести исключение пачек выбросов.
Именно поэтому наиболее подходящим, в условиях
действия выбросов, является способ робастного оценивания параметров траекторных
измерений.
В статистике под робастностью понимают
нечувствительность к различным отклонениям и неоднородностям в выборке,
связанным с теми или иными, в общем случае неизвестными, причинами [3].
К семейству робастных оценок относится медиана. Метод
фильтрации, основанный на использовании этой статистики, называется медианной [3].
Медианная фильтрация осуществляется посредством
движения некоторой скользящей полосы, содержащей в себе нечетное количество
точек (апертуры) вдоль последовательности измерений и замены значения элемента
выборки в центре апертуры медианой исходных значений отсчетов, принадлежащих рассматриваемому
интервалу. После применения медианного фильтра, получается более гладкая (по
сравнению с исходной) результирующая последовательность измерений.
Основным преимуществом медианных фильтров над
линейными фильтрами является эффективность при борьбе с импульсными шумами, к
классу которых можно отнести и выбросы, но они хуже фильтруют шумы измерений.
В связи с вышеописанным, рассмотрим еще одну схему
редактирования данных с неправдоподобными значениями, использующую свойство
робастности медианы. Она называется процедурой «Тьюки 53Х». При вычислении
оценки с помощью «Тьюки 53Х» усреднение по медиане используется дважды.
Анализ показал, что процедура «Тьюки 53Х» лучше
справляется с шумами измерений.
Для проведения сравнительного анализа оценивания
параметров НС по загрязненной выборке был выбран метод имитационного
моделирования.
Термин «имитационное» определяет в моделировании такую
область, которая относится к получению экспериментальной информации о сложном
объекте, которая не может быть получена иным путем, как экспериментируя с его
моделью на ПЭВМ.
Имитационное моделирование – это воспроизведение на
ЭВМ (имитация) процесса функционирования исследуемой системы, соблюдая
логическую и временную последовательность протекания процессов, что позволяет
узнать данные о состоянии системы или отдельных ее элементов в определенные
моменты времени.
Объектом моделирования является траектория движения
НС.
Для проведения эксперимента используется программный
имитатор ModBis24 [2], разработанный во ФГУП «СНИИМ», при непосредственном
участии автора. С помощью данного программного обеспечения моделируется полет
НС, и результатом работы программы является массив измеренных дальностей.
Последующая обработка измерений с целью получения
оценки координат НС производилась с помощью
программного приложения к ModBis24 Flysatell, а также средств Excel.
Моделирование проводилось с использованием следующих
данных:
-
интервал радиовидимости
КА - 5ч;
-
СКА шума
измерений
-
количество
выбросов – 3;
-
амплитуда
выбросов –
-
моменты появления
выбросов: k1=100, k2=300, k3=500.
Также был рассмотрен случай действия пачки выбросов.
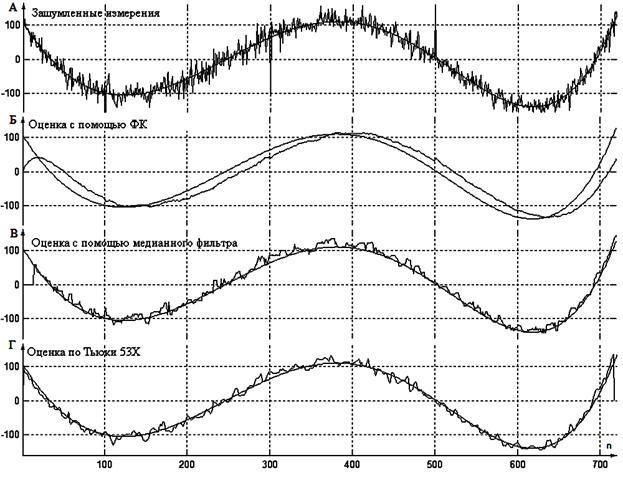
Рис. 3. Оценки измерений (1) с помощью ФК
(2), МФ(3) и процедуры «Тьюки 53Х» (4).
Для анализа качества оценивания выборки измерений в
условиях действия выбросов используем СКО, характеризующая степень наличия
шумов в данных. Величины СКО при использовании различных процедур оценивания
представлены в Таблица
1.
Таблица 1.
Величины
СКО при использовании различных процедур оценивания.
|
Процедура оценки |
СКО, м |
|
Без
использования фильтрации |
20 |
|
Адаптивный
фильтр Калмана |
4.2 |
|
Медианный
фильтр |
11.7 |
|
Процедура
Тьюки 53Х |
9.4 |
Таким образом, из таблицы
1 видно, что помехи
лучше отрабатывает адаптивный фильтр Калмана. Но использование его в чистом
виде неоправданно из-за возможности появления в измерениях пачки выбросов (Рис. 2), тогда как фильтры, использующие свойство робастности
медианы хорошо справляются с этой проблемой.
Исходя из вышесказанного, целесообразно применять
процедуру «Тьюки 53Х» для исключения выбросов, а затем адаптивную фильтрацию
Калмана для понижения уровня регулярных помех.
Таким образом, предварительная фильтрация данных с
помощью процедуры «Тьюки 53Х» перед применением линейного фильтра Калмана
позволяет добиться высокой точности оценивания результатов траекторных
измерений (СКО = 2.3м), и избавиться от негативного влияния эффекта мультипути.
Программный имитатор измерительной информации сети
беззапросной измерительной станции представляет собой эффективный инструмент
для отработки эфемеридно-временного обеспечения космической навигационной
системы ГЛОНАСС, позволяющий проводить сравнительный анализ алгоритмов
оценивания орбит, определять рациональный состав измерений и осуществлять
подбор согласующих моделей для расчета компенсирующих поправок к факторам,
влияющим на точность измерений. Также имитатор ModBis24 позволил провести
анализ имеющихся методов и средств предварительной обработки данных, и
составить рекомендации по использованию того или иного алгоритма для получения
результата, максимально приближенного к реальному.
В процессе проведения
исследования алгоритмов предварительной обработки данных траекторных измерений,
был сделан вывод о том, что для решения задачи, необходимо иметь такую опорную
траекторию движения НС, которая была бы максимально приближена к истинной
траектории. Было принято для этих целей использовать априорную эфемеридную
информацию и опирающуюся на нее интерполяцию. Анализ показал, что лучше всего
для этих целей подойдет интерполяция ортогональными полиномами Чебышева второго
порядка.
Предложена адаптивная конструкция фильтра Калмана
адаптирующаяся к поступающей информации, что сделало процедуру фильтрации
робастной.
Произведенный сравнительный анализ подходов и
алгоритмов выявления и исключения выбросов (использование адаптивного линейного
фильтра Калмана, медианного фильтра и процедуры «Тьюки 53Х») показал
целесообразность предварительной медианной фильтрации исходных данных перед
применением линейного фильтра.
В фазовых измерениях, факт скачка обнаруживается по дифференцированной
фазе. Тогда в производной скачек будет выглядеть как выброс. В эти моменты
результаты фазовых измерений сравниваются с результатами таких же кодовых
измерений.
Результаты исследований нашли применение в
разработанном во ФГУП «СНИИМ» имитаторе измерительной информации получаемой с
сети беззапросных измерительных станций по орбитальной группировке ГЛОНАСС.
Полученные результаты модельных исследований и
результаты обработки реальных сигналов хорошо согласуются с теоретическими
положениями, положенными в основу синтеза робастных алгоритмов обработки
измерительной информации.
Литература.
1.
Антонович К.М.
Использование спутниковых радионавигационных систем в геодезии // Том
3.
Ершов А.А.
Стабильные методы оценки параметров //Автоматика и телемеханика, 1978, №8, с.
66-100.
Поступила в
редакцию 15.09.2008 г.