Бикаскадная
адаптивная система управления
Валюх Антон Анатолиевич,
соискатель
Днепропетровского национального университета им. О. Гончара,
В
1948 году свет увидел книгу Н. Винера «Кибернетика или правление и связь в
животном и машине», в которой обобщил свои наблюдения, сформулировал общие принципы
построения и работы управляющих систем, показал ключевую роль информации в них.
Согласно Винеру систему управления можно представить в виде единой схемы, пример
которой представлен на рисунке 1.

Рис. 1. Система управления согласно Н. Винеру.
В
1985 году Марвин Минский издает знаменитую книгу "The Society of
Mind", в которой высказывает мнение, что мышление может быть результатом
взаимодействия очень большого количества простых механизмов, каждый из которых
отдельно невежествен[6].
В
марте 2007 в одной из статей Марвин Минский критикует современное развитие
искусственного интеллекта. Автор отмечает, что в последнее время в научных
разработках на тему искусственного интеллекта значительно снизилось влияние
альтернативных подходов, таких как нейросети и генетические алгоритмы
(эволюционный отбор). Исследователи вернулись к более традиционным
направлениям, но за тридцать лет не сделали значительного шага по направлению к
искусственному интеллекту так называемого «общего предназначения», обладающего
здравым смыслом. Согласно автору, прогресс в этом направлении практически
остановился в середине 70-х [1].
В
истории развития теории автоматического управления четко выделяются три этапа.
Первым был этап классической детерминированной теории автоматического регулирования,
охвативший период времени с конца XIX по 40-е годы XX века. В этот период основными
задачами управления были задача устойчивости и задача о качестве переходных
процессов. Второй этап теории управления начался в 40—50-х годах XX века и длился примерно до середины 70-х годов XX века . Это — этап классической стохастической
теории автоматического регулирования. Он характеризуется новой постановкой
основной задачи теории управления: учесть случайные возмущения, действующие на
систему, и обеспечить хорошую работу в условиях постоянно действующих помех.
С
конца 80-х, начала 90-х годов XX века в
развитии теории автоматического управления начался новый этап, связанный с
адаптивной постановкой основной задачи управления. Ее особенность состоит в отсутствии
изначальных знаний о математической модели объекта управления (ОУ), будь то
дифференциальные уравнения или плотности вероятностей случайных внешних
воздействий. Объект — это некий черный ящик, подвергающийся неизвестным
случайным воздействиям. Нам доступны только его входы и выходы. Цель системы
управления (СУ) состоит в том, чтобы уже в процессе функционирования определить
закон регулирования, обеспечивающий оптимальное поведение объекта. Для решения
этой задачи в дополнение к основному контуру в систему управления вводится
контур адаптации (см. рисунок. 2).
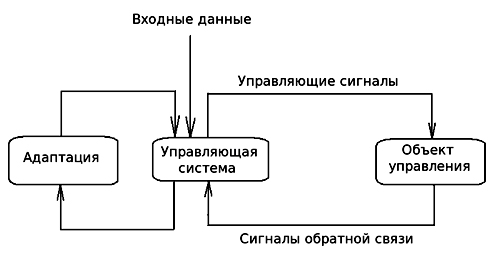
Рис.2. Общая схема адаптационной системы управления.
С
самого начала третьего этапа огромное внимание уделялось адаптивному управлению
линейными стационарными объектами с неизвестными параметрами (например, широко
используемые методики, опирающиеся на построение наблюдателей). В рамках этого
подхода в 80-х годах началось использование ИНС для решения задач управления.
Полученные результаты показали, что ИНС представляют собой на просто новую
методику в теории автоматического управления, а целую парадигму. Для нового
направления в теории управления Вербосом было введено отдельное название —
нейроуправление [3].
На
практике получили распространение 3 архитектуры нейронных сетей используемых
для построения контроллеров: контроллер с предсказанием, контроллер на основе
модели авторегрессии со скользящим средним контроллера на основе эталонной
модели [4].
При описании ОУ с помощью математических
уравнений (математических функций), мы тем самым описываем его поведение от
зависимых параметров — записываем алгоритм его поведения при изменении входных
параметров. Организовывая какой-либо алгоритм, мы всегда ставим перед собой
цель реализации (в частности вычисление) какой либо функции. Таким образом,
понятия алгоритма и функции являются эквивалентными и фактически алгоритм – это
способ задания функции, а функция есть ничто иное как алгоритм. Эта идея
впервые была высказана Эмилем Постом и развита Д. фон Нейманом в работе [5].
Общими для всех архитектур нейроуправления является то, что нейронная сеть
описывает функцию зависимости состояния ОУ от значений параметров управления —
то есть реализует алгоритм управления данного ОУ.
Предположим
что СУ на этапе своего обучения будет способна сама устанавливать зависимости между
параметрами ОУ, а затем сама описывать и реализовывать эти зависимости в виде
функций. Таким образом СУ самостоятельно выполнит задачу создания возможного
алгоритма поведения. Это в свою очередь означает СУ приобретет свойство самопрограммирования
— ключевого момента систем искусственного интеллекта.
Возьмем
за основу две гипотезы Марвина Минского. Во первых мышление может быть
результатом взаимодействия нескольких простых механизмов. Во вторых, метод заведомо
предусматривает использование одновременно несколько методов хранения и обработки
информации. Он не накладывает ни каких ограничений на применение нейросетей,
баз данных, математической логику, языки высокого уровня, и т.д. Более того, одна
и та же система может быть вполне реализована с применением разных подходов и
технологий.
Опираясь
на эти положения рассмотрим идею создания бикаскадной адаптивной СУ состоящей
из 2-х взаимосвязанных частей – целевого каскада и функционального каскада.
Каждый по отдельности они не являются высокоинтеллектуальными устройствами. Но
их разумная комбинация уже может более точно моделировать поведение высших живых
организмов. При этом каждая из двух этих частей может быть реализована с использованием
различных методов хранения и обработки информации
Представим
объект управления в виде так называемого черного ящика. Природа такого черного
ящика может быть самой различной: будь то сложный технологический процесс,
управление движением аппарата, система интеллектуального климат контроля, или
какая либо экономическая модель поведения. Однако нам доступны все его входы и
выходы. Таким образом для нас важна лишь возможность воздействия на этот черный
ящик путем посылки в него управляющих импульсов, а также получение информации о
результате этого воздействия и состоянии объекта посредством обратной связи
(см. рис. 1). При этом нам абсолютно безразлична природа этого черного ящика.
Для
связности изложения дальнейшего материала введем ряд терминов и определений.
Регулирующий
параметр γ – параметр, значение которого передается
из СУ в ОУ с целью его управления (управляющий сигнал). Область допустимых
значений γ зависит от каждой конкретной задачи управления.
В
общем виде, если регулирующих параметров больше, чем один, есть смысл говорить
о множестве (алфавите) регулирующих параметров ![]() .
.
Регулируемый
параметр λ – параметр, значение которого передается по линии обратной
связи из ОУ в СУ для ее информирования о состоянии ОУ (сигналы обратной связи).
Область допустимых значений λ также зависит от конкретной задачи.
Аналогично
введем понятие множества (алфавита) регулируемых параметров ![]() .
.
Текущая
ситуация – значения всех регулируемых параметров множества Λ в определенный
текущий момент времени t ![]() .
.
Так
как целью СУ является приведение ОУ в определенное заданное (целевое) состояние,
то есть смысл говорить о целевой ситуации. Целевая ситуация - значения всех регулируемых
параметров множества Λ, которые должны будут характеризовать состояние ОУ
после воздействия на него СУ ![]() . Человеческий мозг всегда сосредоточен на какой-либо цели
независимо от того, выполняет ли человек простую физическую работу, или решает
сложную интеллектуальную задачу. Именно цель заставляет человека думать [2].
. Человеческий мозг всегда сосредоточен на какой-либо цели
независимо от того, выполняет ли человек простую физическую работу, или решает
сложную интеллектуальную задачу. Именно цель заставляет человека думать [2].
Ведем
следующее множество: ![]() .
.
Элементы
такого множества позволяют оценить расстояние между текущей и целевой
ситуацией.
Под
выполнением программы (или что тоже самое алгоритма) управления будем
подразумевать процесс перехода от текущей ситуации ![]() к целевой ситуации
к целевой ситуации ![]()
![]() . При этом
. При этом ![]() . Программа управления считается успешно выполненной, если
выполняются условия (1) и (2)
. Программа управления считается успешно выполненной, если
выполняются условия (1) и (2)
![]() (1)
(1)
![]() (2)
(2)
Как
отметалось выше понятия алгоритма и функции являются эквивалентными.
Основываясь на этом, правомерно будет утверждать, что для реализации алгоритма
управления необходимо и достаточно реализовать и выполнить аналитическую
функцию перехода из ![]() в
в ![]() .
.
Единственный
способ воздействия на ОУ со стороны СУ это регулирующие параметры. Иначе говоря,
для изменения Λ необходимо подать в ОУ определенное значение Г (набор
управляющих сигналов γi). Аналитически
это можно записать в виде выражения (3).
Λ
= F(Г) (3)
Выражение
(3) можно представить в более полном виде. В результате чего получим выражение
(4).
![]() (4)
(4)
Для
понимания сути (4) рассмотрим детально выражение (5):
![]() (5)
(5)
Здесь
регулируемый параметр λi может завесить
не от одного регулирующего параметра (к примеру γi), а от нескольких таких параметров. Назовем их
сопутствующими параметрами и объединим в отдельное подмножество ![]() . В свою очередь, все подмножества
. В свою очередь, все подмножества ![]() также удобно
объединить в отдельное множество
также удобно
объединить в отдельное множество ![]() , то есть
, то есть ![]() . В случае если регулируемый параметр λi завесит лишь от одного регулирующего параметра
γi, имеем
. В случае если регулируемый параметр λi завесит лишь от одного регулирующего параметра
γi, имеем ![]() . В результате, вся аналитическая запись упрощается до вида
представленного в выражении (6)
. В результате, вся аналитическая запись упрощается до вида
представленного в выражении (6)
![]() (6)
(6)
В
результате имеем ![]() .
.
В
свою очередь сходя из выражения (7) или выражения (8) существует возможность
обеспечения перехода в ![]() посредством
посредством ![]() или
или ![]() .
.
![]() (7)
(7)
![]() (8)
(8)
Проще
говоря, если на ОУ подействовать набором регулирующих параметров (управляющих импульсов)
из множеств ![]() или
или ![]() , то он перейдет из текущей ситуации
, то он перейдет из текущей ситуации ![]() в целевую ситуацию
в целевую ситуацию ![]() . Достижения целевой ситуации, в свою очередь отражает
процесс работы программы управления.
. Достижения целевой ситуации, в свою очередь отражает
процесс работы программы управления.
Однако
остается открытым вопрос о том, как определить необходимое значение ![]() (
(![]() )? Во-первых, воспользуемся тем фактом, то в СУ по цепи
обратной связи всегда поступает информация о состоянии ОУ. Это позволяет СУ
определить в любой момент определить текущую ситуацию
)? Во-первых, воспользуемся тем фактом, то в СУ по цепи
обратной связи всегда поступает информация о состоянии ОУ. Это позволяет СУ
определить в любой момент определить текущую ситуацию ![]() – другими словами, СУ
всегда «знает» в каком положении она оказалась. С другой стороны целевая
ситуация
– другими словами, СУ
всегда «знает» в каком положении она оказалась. С другой стороны целевая
ситуация ![]() всегда должна быть строго задана. Иначе говоря, мы (в
частности СУ) всегда должны знать, чего хотим достичь в результате. В противном
случае, зачем нам или системе вообще предпринимать какие-либо действия, если мы
и сами не знаем, чего мы хотим? Таким образом, СУ в любой момент времени «знает
о сложившейся ситуации» вокруг нее (
всегда должна быть строго задана. Иначе говоря, мы (в
частности СУ) всегда должны знать, чего хотим достичь в результате. В противном
случае, зачем нам или системе вообще предпринимать какие-либо действия, если мы
и сами не знаем, чего мы хотим? Таким образом, СУ в любой момент времени «знает
о сложившейся ситуации» вокруг нее (![]() ), и четко «понимает чего она хочет добиться» в условиях
сложившейся ситуации (
), и четко «понимает чего она хочет добиться» в условиях
сложившейся ситуации (![]() ).
).
Первым
шагом, который что должна сделать СУ для перехода в целевую ситуацию ![]() это определить
насколько она (СУ) далека от достижения цели – рассчитать
это определить
насколько она (СУ) далека от достижения цели – рассчитать ![]() исходя из выражения (9).
исходя из выражения (9).
![]() (9)
(9)
Следующим,
на наш взгляд наиболее правильным шагом является определение необходимых величин
множества ![]() (
(![]() ) на основании полученных результатов по
) на основании полученных результатов по ![]() .
.
Для
реализации этой задачи, очевидно, потребуется новое множество функций каждая из
которых будет устанавливать связь между элементами множеств ![]() (
(![]() ) и
) и ![]() . Пусть имеем (10), причем справедливо выражение (11).
. Пусть имеем (10), причем справедливо выражение (11).
![]() (10)
(10)
![]() (11)
(11)
Функция
φi показывает
какое значение должны принять регулирующие параметры из ![]() при разнице
при разнице ![]() между текущим (
между текущим (![]() ) и целевым значением (
) и целевым значением (![]() ) для i-го набора регулирующих
параметров. В случае если выполняется условия (12) и как следствие условие
(13),
) для i-го набора регулирующих
параметров. В случае если выполняется условия (12) и как следствие условие
(13),
![]() (12)
(12)
![]() (13)
(13)
то
в результате имеет место выражение (14).
![]() (14)
(14)
Причем
![]() описывается
посредством (15).
описывается
посредством (15).
![]() (15)
(15)
Функция
φi показывает
какое значение должен принять регулирующий параметр ![]() при разнице
при разнице ![]() между текущим (
между текущим (![]() ) и целевым значением (
) и целевым значением (![]() ) для i-го
регулируемого параметра. Очевидно, что Ф есть множество функций, обратных по
отношению к множеству функций F:
) для i-го
регулируемого параметра. Очевидно, что Ф есть множество функций, обратных по
отношению к множеству функций F: ![]() .
.
В
случае если, выполняется условие (13), то есть смысл говорить о справедливости
выражения (16)
![]() (16)
(16)
и как
следствие имеет место (17).
![]() (17)
(17)
В
этом случае задача решается достаточно тривиально. Действительно, нет никаких
трудностей в описании функции обратной по отношению к функции одной переменной.
Очевидно, такая обратная функция тоже будет завесить от одной переменной, а так
как все переменные строго определены, и зависимости известны, то задача
решается очень просто.
Куда
сложнее обстоит дело, если условие (13) не выполняется. В этом случае имеем
(18).
![]() (18)
(18)
Так
как невозможно решить одно уравнение с k-неизвестными,
то в таком виде зада не имеет решения. Для того чтобы попытаться решить эту
задачу построим набор частных функций ![]() для каждого элемента
для каждого элемента ![]() из подмножества
из подмножества ![]() , имеем уравнение (19).
, имеем уравнение (19).
![]() (19)
(19)
Так
как каждый управляющий параметр ![]() может входить в
несколько подмножеств
может входить в
несколько подмножеств ![]() , то каждый такой параметр может быть при необходимости
описан набором уравнений
, то каждый такой параметр может быть при необходимости
описан набором уравнений ![]() . Уравнений
. Уравнений ![]() будет столько, сколько
подмножеств,
будет столько, сколько
подмножеств, ![]() в составе которых есть
параметр
в составе которых есть
параметр ![]() . Таким образом, для каждого
. Таким образом, для каждого ![]() имеем набор функций
имеем набор функций ![]() который показывает как
который показывает как
![]() зависит от
определенного
зависит от
определенного ![]() и от остальных сопутствующих
ему управляющих параметров, влияющих на
и от остальных сопутствующих
ему управляющих параметров, влияющих на ![]() . Объединим эти функции каждого
. Объединим эти функции каждого ![]() в отдельное множество
(20) которое представляет собой набор уравнений определяющий
в отдельное множество
(20) которое представляет собой набор уравнений определяющий ![]() .
.
![]() (20)
(20)
В
случае если ![]() зависит лишь от одного
зависит лишь от одного ![]() , а последний в свою очередь влияет только на само
, а последний в свою очередь влияет только на само ![]() , то имеем частный случай совпадающий с (17).
, то имеем частный случай совпадающий с (17).
Теперь,
к примеру, для нахождения для нахождения ![]() нам необходимо взять одно уравнение из множества
нам необходимо взять одно уравнение из множества ![]() и определить сколько в
нем неизвестных. Очевидно, что в качестве неизвестных в нашем случае выступают
сопутствующие управляющие параметры, каждый из которых в, свою очередь,
определен соответствующим набором
и определить сколько в
нем неизвестных. Очевидно, что в качестве неизвестных в нашем случае выступают
сопутствующие управляющие параметры, каждый из которых в, свою очередь,
определен соответствующим набором ![]() . Таким образом, для их нахождения также необходимо взять
одно уравнение из множества
. Таким образом, для их нахождения также необходимо взять
одно уравнение из множества ![]() для каждого неизвестного. Процесс будет продолжаться
итеративно до тех пор, пока в самом низу не окажутся простые зависимости от
одной переменной вида (17) (одна неизвестная, одно уравнение). Фактически для
нахождения
для каждого неизвестного. Процесс будет продолжаться
итеративно до тех пор, пока в самом низу не окажутся простые зависимости от
одной переменной вида (17) (одна неизвестная, одно уравнение). Фактически для
нахождения ![]() мы должны решить
систему уравнений. Если же внизу так и не окажется простых зависимостей, то
следовательно, неизвестных больше чем уравнений и задачу подобным образом не
решить. Выходом может быть возврат в начальную точку и выбор другого уравнения
из
мы должны решить
систему уравнений. Если же внизу так и не окажется простых зависимостей, то
следовательно, неизвестных больше чем уравнений и задачу подобным образом не
решить. Выходом может быть возврат в начальную точку и выбор другого уравнения
из ![]() . Либо изначально заранее задать один или несколько неизвестных
сопутствующих управляющих параметров, тем самым искусственно сократив число
неизвестных.
. Либо изначально заранее задать один или несколько неизвестных
сопутствующих управляющих параметров, тем самым искусственно сократив число
неизвестных.
Подведем
небольшой итог всему вышесказанному:
1.
Алгоритм управления – это выполнение функции
перехода из текущего состояния![]() , в состояние которое определено как целевое
, в состояние которое определено как целевое![]() .
.
2.
Для реализации функции перехода из ![]() в
в ![]() необходимо выполнить
следующие действия:
необходимо выполнить
следующие действия:
1.
По имеющимся данным ![]() и
и ![]() исходя из выражения
(7) определить
исходя из выражения
(7) определить ![]() .
.
2.
Если выполняется условие ![]() то
то ![]() и цель достигнута. Переход к пункту 1.
и цель достигнута. Переход к пункту 1.
3.
Используя ![]() посредством уравнений из множества Ф рассчитать значения
множества регулирующих параметров
посредством уравнений из множества Ф рассчитать значения
множества регулирующих параметров ![]() (
(![]() ).
).
4.
Подать рассчитанные значения множества
регулирующих параметров ![]() (
(![]() ) в ОУ.
) в ОУ.
5.
Дождаться, пока ОУ перейдет в новое состояние
посредством выражений из множества F, а затем
перейти к пункту 1.
Общий
вид бикаскадной адаптивная система управления представлен на рисунке 3.
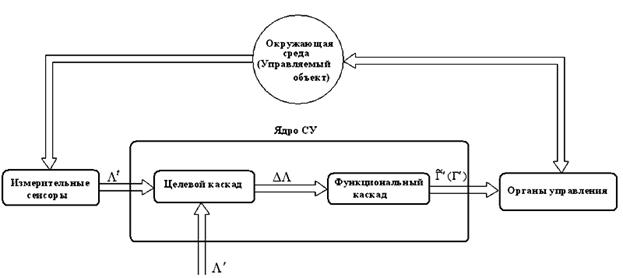
Рис.3. Бикаскадная адаптивная система управления.
Термин
бикаскадная отражает тот факт, что (как видно из рисунка 3) управляющее ядро
такой системы состоит из двух взаимосвязанных частей – каскадов. В состав системы
входят целевой каскад и функциональный каскад. Целевой каскад выполняет пункты
1-2 алгоритма перехода, а функциональный каскад реализует пункты 3-4. Образно
говоря целевой каскад ставит средства перед СУ, а функциональный каскад
определяет средства и способы достижения поставленной цели. Рассмотрим далее
более подробно работу каждого из каскадов.
Целевой
каскад имеет множество входов на которое подаются данные ![]() , множество входов на которое подаются данные
, множество входов на которое подаются данные ![]() , входы для принятия служебной информации от функционального
каскада, множество выходов для передачи данных
, входы для принятия служебной информации от функционального
каскада, множество выходов для передачи данных ![]() , и служебные выходы, которые позволяют оператору следить за
работой всей СУ (наличие служебных выходов не обязательно и зависит лишь от
решаемой задачи и области применения СУ).
, и служебные выходы, которые позволяют оператору следить за
работой всей СУ (наличие служебных выходов не обязательно и зависит лишь от
решаемой задачи и области применения СУ).
Основной
задачей целевого каскада является вычисление ![]() на основе полученных
данных
на основе полученных
данных ![]() и
и ![]() согласно выражению (9), проверка условия (2) и в случае его
невыполнение передача
согласно выражению (9), проверка условия (2) и в случае его
невыполнение передача ![]() в функциональный блок.
Процесс вычисления
в функциональный блок.
Процесс вычисления ![]() выполняется в
вычислительном блоке, а проверка условия (2) данных в функциональный блок
осуществляется посредством блока управления целевым каскадом.
выполняется в
вычислительном блоке, а проверка условия (2) данных в функциональный блок
осуществляется посредством блока управления целевым каскадом.
При
этом целевому каскаду безразлично, кто предоставил ему ![]() . Другими словами, ему все равно кто «требует» от него
перейти в целевую ситуацию, и какие цели он при этом преследует. К примеру, это
вполне может быть человек оператор, который подавая в СУ
. Другими словами, ему все равно кто «требует» от него
перейти в целевую ситуацию, и какие цели он при этом преследует. К примеру, это
вполне может быть человек оператор, который подавая в СУ ![]() тем самым как бы
говорит системе, какой результат он хочет от нее получить после отработки
программы. В таком случае целевой каскад играет еще и роль интерфейса пользователя
при помощи которого он «общается» с системой.
тем самым как бы
говорит системе, какой результат он хочет от нее получить после отработки
программы. В таком случае целевой каскад играет еще и роль интерфейса пользователя
при помощи которого он «общается» с системой.
Получая
такие «инструкции сверху» и рассчитав насколько желаемое отличается от
действительного (![]() ), целевой каскад передает эти данные в функциональный блок.
При этом целевому каскаду безразлично как дальше функциональный каскад будет
«справляется с поставленной ему целью».
), целевой каскад передает эти данные в функциональный блок.
При этом целевому каскаду безразлично как дальше функциональный каскад будет
«справляется с поставленной ему целью».
Оператор-пользователь
также может существенно облегчить переход системы в целевую ситуацию, если
разобьет путь этого перехода на несколько мелких подцелей ![]() . Тем самым он детализирует что конкретно он хочет получить,
и следовательно помогает системе более точно решить конкретную задачу. В свою
очередь, ничто не мешает запить последовательность
. Тем самым он детализирует что конкретно он хочет получить,
и следовательно помогает системе более точно решить конкретную задачу. В свою
очередь, ничто не мешает запить последовательность ![]() в виде отдельного
файла (к примеру, в формате XML, на языках
семейства LISP-PROLOG
в виде таблицы базы данных и т.д.) и тем самым получить своеобразную
макропрограмму, перехода
в виде отдельного
файла (к примеру, в формате XML, на языках
семейства LISP-PROLOG
в виде таблицы базы данных и т.д.) и тем самым получить своеобразную
макропрограмму, перехода ![]() хранимую внутри
целевого блока. Однажды создав такую макропрограмму ее можно использовать неограниченное
число раз сократив время перехода
хранимую внутри
целевого блока. Однажды создав такую макропрограмму ее можно использовать неограниченное
число раз сократив время перехода ![]() для аналогичной ситуации.
для аналогичной ситуации.
Интересной
с практической точки зрения также является ситуация, когда цель перед СУ ставит
не внешний оператор-пользователь, а сама система. Это превращает систему не в
просто исполнителя чужой воли и чужих желаний, а автономную сущность. Она могла
бы быть способна сама ставить перед собой важные для нее цели, а затем
выполнять их. Эта идея, к примеру, очень актуальна в робототехнике.
Рассмотрим,
к примеру, знаменитых кибернетических «черепашек» английского нейрофизиолога и
пионера робототехники Грея Уолтера. «Черепашки» представляли собой
самодвижущиеся электромеханические тележки, способные ползти на свет или от него,
обходить препятствия, заходить в «кормушку» для подзарядки разрядившихся аккумуляторов.
Такая черепаха преследует две основные цели при своем движении по комнате –
быть всегда «сытой» и держатся в области комнаты с приемлемой освещенностью.
При этом, никто из вне не ставит перед черепахой никаких целей, она сама
определяет достаточно ли она проголодалась, или достаточно ли ей светло (не
слишком ли ярко). Определив свое состояние, она начинает действовать для
достижения своих целей – поесть, отойти или подойти к источнику света.
Предположим,
что по каким-либо причинам функциональный каскад по линии служебной информации
сообщил целевому каскаду, что он не может справится с поставленной задачей, или
результат его работы носит неудовлетворительный характер (процесс перехода ![]() занял неоправданно
много времени). В таком случае функциональному каскаду подается команда на остановку
и реорганизацию. В течении процесса реорганизации функциональный каскад
обновляет все свои уравнения множества Ф, что позволяет как обновить старые
зависимости так и выявить новые вызванные изменением внутри ОУ. Проведение
процесса реорганизации позволяет реализовать идею адаптивности в постоянно
изменяющейся среде. Если после многократных реорганизаций результат работы не
стал лучше, то считается, что СУ не может решить поставленную задачу.
занял неоправданно
много времени). В таком случае функциональному каскаду подается команда на остановку
и реорганизацию. В течении процесса реорганизации функциональный каскад
обновляет все свои уравнения множества Ф, что позволяет как обновить старые
зависимости так и выявить новые вызванные изменением внутри ОУ. Проведение
процесса реорганизации позволяет реализовать идею адаптивности в постоянно
изменяющейся среде. Если после многократных реорганизаций результат работы не
стал лучше, то считается, что СУ не может решить поставленную задачу.
Логика
работы целевого каскада достаточно проста и может быть вполне реализована при
помощи любых известных способов программирования, будь то обычные языки высоко
уровня, либо языки семейства LISP-PROLOG. В последнем случае появляется дополнительная
возможность изменения логики поведения целевого блока в процессе его работы.
Общая схема целевого каскада представлена на рисунке 4.
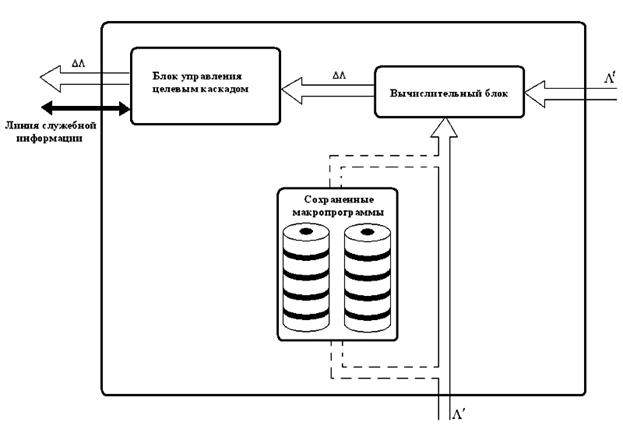
Рис.4. Схема устройства целевого каскада.
Функциональный
каскад имеет множество входов на которое подаются данные ![]() , входы для принятия служебной информации от целевого
каскада, множество выходов для передачи
, входы для принятия служебной информации от целевого
каскада, множество выходов для передачи ![]() (
(![]() ) на управляющие органы, и служебные выходы для передачи
данных в целевой каскад.
) на управляющие органы, и служебные выходы для передачи
данных в целевой каскад.
Основной
задачей функционального каскада является построение и решение системы уравнений
для вычисления вычисление![]() (
(![]() ) на основе полученных данных
) на основе полученных данных ![]() , также построение и обновление набора уравнений (20) для
каждого
, также построение и обновление набора уравнений (20) для
каждого![]() .
Функциональный каскад имеет две фазы работы: фаза бодрствования и фаза сна.
Детальнее на этих фазах мы остановимся потом. Общий
вид структуры функционального каскада представлен на рисунке 5.
.
Функциональный каскад имеет две фазы работы: фаза бодрствования и фаза сна.
Детальнее на этих фазах мы остановимся потом. Общий
вид структуры функционального каскада представлен на рисунке 5.
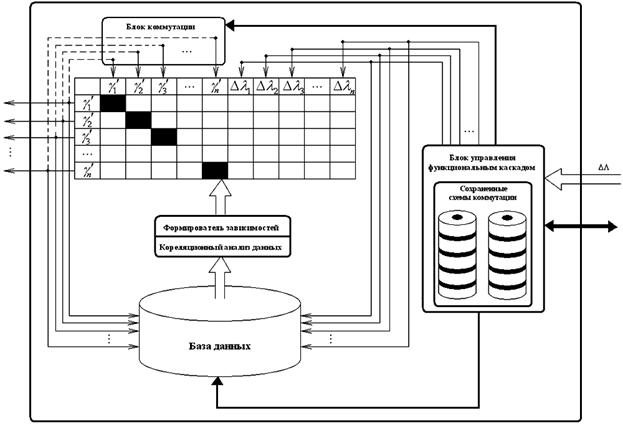
Рис.5. Структуры функционального каскада.
Ядром
функционального каскада является матрица связей и зависимостей (МЗС)
представленная на рисунке 6.
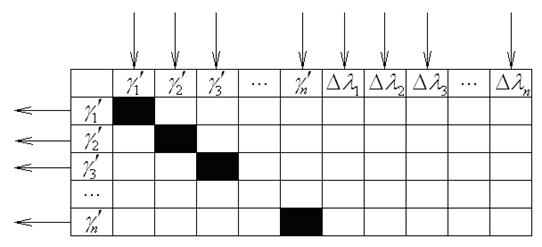
Рис.6. Матрица связей и зависимостей.
МЗС
– таблица, которая условно показывает зависимость определенного управляющего
параметра ![]() от соответствующих ему сопутствующих параметров и
от соответствующих ему сопутствующих параметров и ![]() . Ячейки, окрашенные в черный цвет, отражают тот факт, что
управляющий параметр сам от себя не зависит.
. Ячейки, окрашенные в черный цвет, отражают тот факт, что
управляющий параметр сам от себя не зависит.
Для
того чтобы понять что такое МЗС и как эта структура позволяет создавать и
решать систему уравнений относительно ![]() рассмотрим небольшой
пример. Пусть имеем систему уравнений (21).
рассмотрим небольшой
пример. Пусть имеем систему уравнений (21).
 (21)
(21)
Для
того чтобы представить и решить эту систему с помощью МЗС необходимо выполнить
следующие действия:
1.
Выделить строку с ![]() , относительно которого будет происходить решение системы
уравнений.
, относительно которого будет происходить решение системы
уравнений.
2.
Выделить переменные, от которых зависит ![]() (например, заштриховать соответствующую ячейку) – выбор
(например, заштриховать соответствующую ячейку) – выбор ![]() .
.
3.
Определить неизвестные в уравнении ![]() .
.
4.
Для каждого неизвестного (![]() ) повторить действия 1-4.
) повторить действия 1-4.
В
результате работы такого итеративного алгоритма получим МЗС представленную на
рисунке 7. Или тоже самое, но в виде развернутой схемы коммутации между
соответствующими ![]() на рисунке 8.
на рисунке 8.
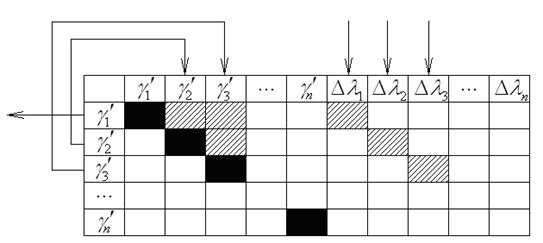
Рис.7. Система уравнений для нахождения ![]() с помощью МЗС.
с помощью МЗС.
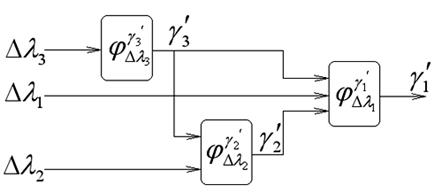
Рис. 8. Развернутая схема коммутации для нахождения ![]() .
.
Для
того чтобы при помощи МЗС найти решение для каждого ![]() посредством реализации
пунктов 1-4, используется блок управления функциональным каскадом (см. рис. 5).
Именно этот блок реализует алгоритм построения схемы коммутации элементов МЗС с
целью построения и решения системы уравнений относительно
посредством реализации
пунктов 1-4, используется блок управления функциональным каскадом (см. рис. 5).
Именно этот блок реализует алгоритм построения схемы коммутации элементов МЗС с
целью построения и решения системы уравнений относительно ![]() . Создание коммутации между элементами МЗС осуществляется
посредством блока коммутации, также контролируемым блоком управления. Однажды
созданная и проверенная схема коммутации сохранятся в виде файла описания (к
примеру в формате XML). Это позволит
в дальнейшем значительно ускорить процесс построения схемы коммутации.
. Создание коммутации между элементами МЗС осуществляется
посредством блока коммутации, также контролируемым блоком управления. Однажды
созданная и проверенная схема коммутации сохранятся в виде файла описания (к
примеру в формате XML). Это позволит
в дальнейшем значительно ускорить процесс построения схемы коммутации.
Однако
главной особенностью предложенной системы есть то, что в исходном состоянии МЗС
абсолютно пуста. Ее заполнение происходит по мере работы системы. В самом
начале каскад (а следовательно и вся система) не знает абсолютно ничего о внешней
среде в которой ему предстоит работать. При этом цель СУ состоит в том, чтобы
уже в процессе функционирования определить все законы регулирования объекта. В
данный момент система похожа на «новорожденного слепого котенка», который
ничего не понимает, но готов учиться по жизни. В самом деле, когда новое живое
существо появляется на свет оно ничего не знает и не умеет (не то что решить
какие либо задачи, а как правило даже ходить). Однако уже в процессе жизни оно
начинает учится и приобретать необходимый опыт. При чем живое существо начинает
собирать информацию об окружающем его мире, анализировать ее на предмет наличия
чегото существенного, делать выводы и т.д. Аналогичным образом пытается
поступает и функциональный каскад. В процессе своего обучения.
Как уже отмечалось выше, функциональный
каскад имеет фазу бодрствования и фазу сна. Как не трудно догадаться из
названия во время фазы бодрствования функциональный блок выполняет свои прямые
обязанности – построение и решение системы уравнений. Однако, по мимо этого
происходит четкое протоколирование всех действий. Для этого в специальную базу
данных заносятся данные о всех ![]() переданных в окружающую среду и о всех
переданных в окружающую среду и о всех ![]() полученных из вне в
виде атрибутов таблицы базы данных. Таким образом, происходит набор статистики,
характеризующей взаимодействие СУ с окружающей средой. Таким образом, на
практике реализуется теория, согласно которой большинство данных, которые поступили
в головной мозг, в течение суток не забываются, а сохраняются в его отделах.
Таким образом, мы сами того не подозревая, помним все что с нами происходило на
протяжении суток. После того как база данных заполнена, блок управления дает
команду перейти в фазу сна. В процессе фазы сна производятся две ключевые
операции над данными хранимыми в базе данных. Во-первых, это построение взаимокорреляционных
функций между атрибутами таблицы базы данных. Делается это для того, чтобы
определить существует ли взаимосвязь между теми или другими атрибутами. Во-вторых,
после того как факт наличия связи между атрибутами установлен, запускается этап
создания функций аппроксимирующих зависимость между этими атрибутами. В результате
имеем набор функций устанавливающих зависимости вида
полученных из вне в
виде атрибутов таблицы базы данных. Таким образом, происходит набор статистики,
характеризующей взаимодействие СУ с окружающей средой. Таким образом, на
практике реализуется теория, согласно которой большинство данных, которые поступили
в головной мозг, в течение суток не забываются, а сохраняются в его отделах.
Таким образом, мы сами того не подозревая, помним все что с нами происходило на
протяжении суток. После того как база данных заполнена, блок управления дает
команду перейти в фазу сна. В процессе фазы сна производятся две ключевые
операции над данными хранимыми в базе данных. Во-первых, это построение взаимокорреляционных
функций между атрибутами таблицы базы данных. Делается это для того, чтобы
определить существует ли взаимосвязь между теми или другими атрибутами. Во-вторых,
после того как факт наличия связи между атрибутами установлен, запускается этап
создания функций аппроксимирующих зависимость между этими атрибутами. В результате
имеем набор функций устанавливающих зависимости вида ![]() , которые затем используются в виде элементов МЗС
рассмотренных нами выше. Этот момент отражает гипотезу о том, что во время сна
головной мозг начинает обрабатывать информацию, полученную за день, при этом спящий
наблюдает сновидения. В конце фазы сна происходит обновление МЗС. При этом
«старую версию» записать, чтобы в случае неудовлетворительной работы выполнить
быстрый откат системы.
, которые затем используются в виде элементов МЗС
рассмотренных нами выше. Этот момент отражает гипотезу о том, что во время сна
головной мозг начинает обрабатывать информацию, полученную за день, при этом спящий
наблюдает сновидения. В конце фазы сна происходит обновление МЗС. При этом
«старую версию» записать, чтобы в случае неудовлетворительной работы выполнить
быстрый откат системы.
В качестве способа аппроксимации
зависимостей целесообразно использование искусственных нейронных сетей, так как
они являются наиболее универсальным способом аппроксимации. Кроме того
нейронную сеть при необходимости всегда можно дообучить, что упрощает процесс
обновления МЗС после сна. При этом схема коммутации представляет собой
несколько объединенных между собой сетей, связь между которыми является
динамической и может менятся в процессе работы системы. Это представляет собой
дополнительную гибкость в использовании МЗС в качестве одного из элементов
адаптивной СУ. Таким образом, схема коммутации отдельных нейронных сетей
представляет собой некое подобие правила решения определенной задачи. К тому же
обледененные между собой несколько нейронных сетей с различными параметрами и
предназначением, более полно моделируют строение головного мозга. Ведь, как
известно мозг тоже состоит из большого числа соединенных между собой отделов.
Для противников нейронных сетей
справедливости ради следует отметить, что в качестве средства аппроксимации
вполне можно использовать и классические методы. К примеру, можно применить
метод наименьших квадратов, или аппроксимацию сплайнами.
Можно пойти еще дальше и часть функций ![]() определить сразу, в виде функций на языках высокого уровня.
Такие функции система не сможет видоизменить в процессе своей работы, они
«вживляются» в нее раз и навсегда. Эта идеология позволяет моделировать наличие
в системе безусловных рефлексов которые присутствуют в любом живом организме
сразу после его рождения. По мнению многих ученых механизм «вживленных»
природой рефлексов и возможность накопление и использование личного опыта является
ключом к приобретению системой свойств интеллектуальности.
определить сразу, в виде функций на языках высокого уровня.
Такие функции система не сможет видоизменить в процессе своей работы, они
«вживляются» в нее раз и навсегда. Эта идеология позволяет моделировать наличие
в системе безусловных рефлексов которые присутствуют в любом живом организме
сразу после его рождения. По мнению многих ученых механизм «вживленных»
природой рефлексов и возможность накопление и использование личного опыта является
ключом к приобретению системой свойств интеллектуальности.
Таким образом, опираясь на базовую идею
из [6] и учтя замечания в [1], а также рассмотрев существующее положение дел
относительно систем нейроуправления в [4] и [3], предложена бикаскадная адаптивная
система управления. Отличительной особенностью данной СУ от существующих — есть
возможность постоянного обучения и адаптированния в условиях постоянных
изменений в сфере ее применения. При этом на сферу применения системы и на
степень ее автономности не накладывается никаких ограничений. Система состоит
из двух связных автономных каскадов, что соответствует идеям, изложенным в [6].
На выбор технологии создания каждого отдельного каскада влияет лишь характер
решаемой задачи. Это в соответствии с [1] представляет дополнительную гибкость
при проектировании подобной системы. Ядром системы является матрица связанных
между собой нескольких нейронных сетей — что в отличии от подходов изложенных в
[4] и [3] позволяет более полно моделировать работу головного мозга. Общий вид
системы представлен на рисунке 9.
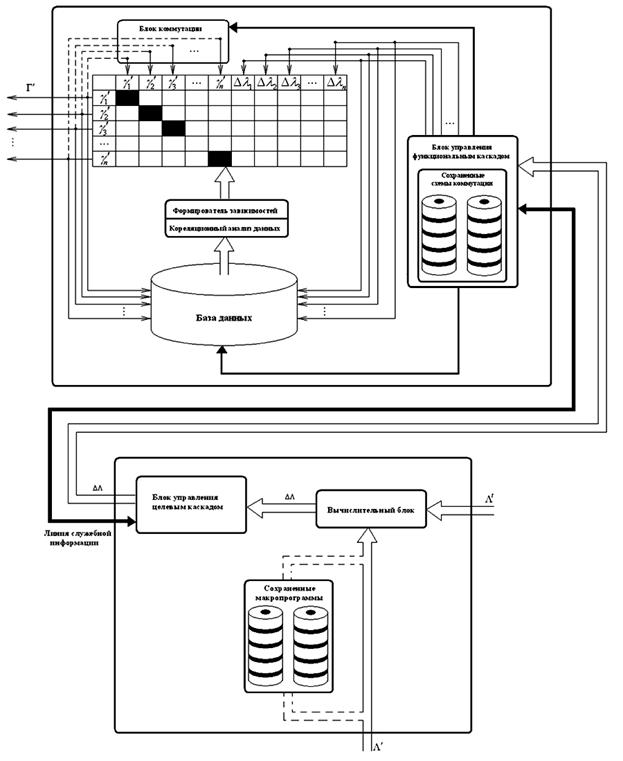
Рис. 9. Общий вид
бикаскадной адаптивной системы управления.
Литература
1.
Ализар А. Марвин Мински недоволен развитием
искусственного интеллекта [Электронный ресурс] / Компьютерные Вести. – Минск:
изд., 2007. – Режим доступа: http://habrahabr.ru/blogs/columns/5095/.
2.
Левин Р. Дранг Д. Эделсон Б. Практическое
введение в технологию искусственного интелекта и экспертных систем с
иллюстрациями на бейсике. - М. :Финансы и статистика, 1991.
3.
Махотило К.В. «Разработка методик эволюционного
синтеза нейросетевых компонентов систем управления», Диссертация на соискание
ученой степени кандидата технических наук по специальности 05.13.06 —
автоматизированные системы управления и прогрессивные информационные
технологии, — Харьков, ХГПУ, —1998, — 189 с.
4.
Медведев.В.С., Потемкин В.Г. Нейронные сети Matlab 6. - М.: Диалог-мифи., 2002.
5.
Нейман Д. Теория самовоспроизводящихся
автоматов. - М. :Мир, 1971.
6.
Minsky M. The Society of
Mind, 1987.
Поступила в редакцию 10.07.2009 г.