Расчетная схема разделения сыпучего
материала на вибрирующей сетке
Рудакова
Елена Вячеславовна,
аспирант Белгородского государственного
технологического университета им. Шухова,
преподаватель кафедры информационных
систем и естественнонаучных дисциплин Курского института социального
образования (филиал) РГСУ.
Научный руководитель – доктор
технических наук, профессор, зав. кафедрой «Материалы и оборудование»
Белгородского государственного технологического университета им. Шухова
Богданов
В.С.
Поведение сыпучих сред, таких
как, например, песок, гравий или каменный уголь, очень разнообразно и зависит
от размера частиц, граничных условий, объемной концентрации, сил действующих на
частицы. Вообще сыпучий материал можно рассматривать как некоторую двухфазную
среду, состоящую из твердых частиц и газа [1-4].
В данной статье рассматривается
сыпучий материал как некоторая совокупность твердых частиц различного размера.
Модель разделения сыпучего материала на вибрирующей сетке построена с использованием
результатов приведенных в работах [2].
Частицы малого диаметра могут
проникать через сетку, а частицы большого диаметра остаются на поверхности
сетки.
Точный расчет для каждой частицы
напряжений и деформаций, которые вызывает контактное взаимодействие, на
современном развитии вычислительной техники не возможен. Поэтому в модели среды
моделируется движение только некоторых частиц, выполняющих роль маркеров, по
перемещению которых с известной степенью точности можно судить о поведении
сыпучего материала в целом. В тоже время, адекватность описания движения
сыпучего материала с помощью дискретной модели напрямую зависит от количества
частиц, представленных в модели и правильности моделирования процессов
взаимодействия между частицами.
Далее рассматривается модель
неразрушающего взаимодействия частиц. Природа возникновения сил, действующих на
частицы при контакте связана с упругим взаимодействием, диссипацией энергии, сухим
трением.
На рис. 1 приведена расчетная
схема технологического процесса разделения сыпучего материала по фракциям. На
схеме приняты следующие обозначения: 1 - частицы; 2 - разделительная сетка; 3 -
корпус грохота.
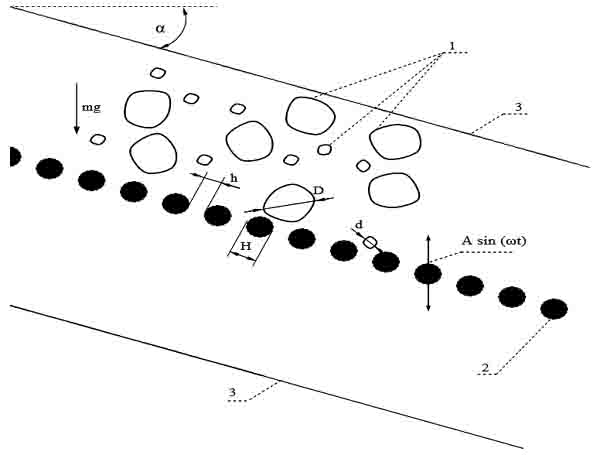
Рис.
1. Расчетная схема системы: 1 – частицы сыпучего материала, 2 –разделительная
сетка, 3 – корпус грохота.
На схеме приняты
следующие обозначения:
α – угол наклона
сетки сепаратора;
H – диаметр сетки
сепаратора;
h – минимальное
расстояние между проволокой сетки сепаратора;
A- амплитуда
колебаний сетки сепаратора;
ω – частота
колебаний сепаратора;
d – максимальный
диаметр малых частиц;
D – минимальный
диаметр больших частиц среды.
Рассмотрим контакт двух
сферических частиц i и j, с радиусами Ri и Rj, массами mi
и mj, моментами инерции Ii и Ij, координатами
центров масс (xi,yi), (xj,yj) ,
линейными скоростями Vi,и Vj, и угловыми скоростями
ωi,и ωj соответственно. При столкновении частицы
соприкасаются в одной точке - точке контакта С, как показано на рис. 2, где Р –
контактная плоскость, касательная к i и j в точке C.
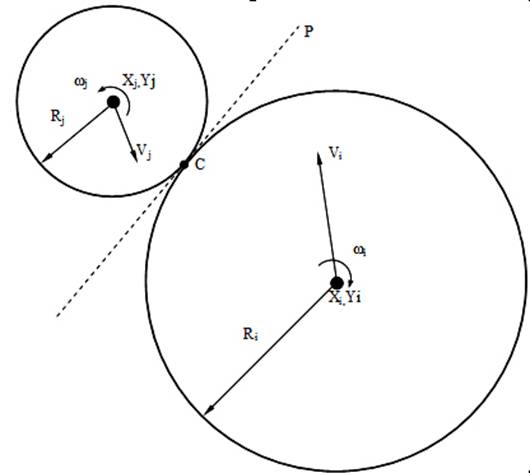
Рис. 2.
Контакт двух сферических частиц (начало взаимодействия).
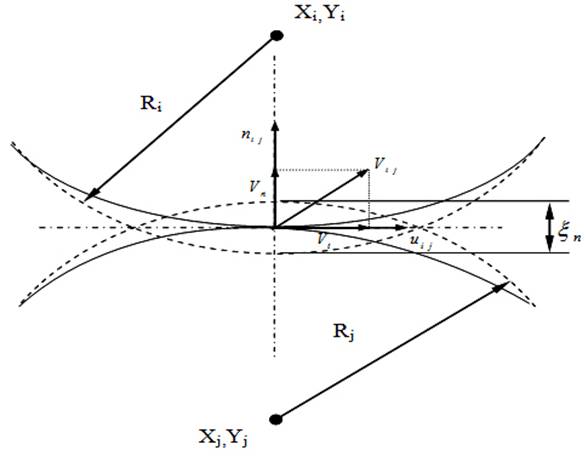
Рис. 3.
Контакт двух сферических частиц (деформация поверхности).
В ходе контакта частицы
сжимаются, их центры сближаются, а поверхности вблизи точки С деформируются, в
результате чего образуется пятно контакта, размер которого мал по сравнению с
размерами частиц.
На рис. 3 сплошной линией показаны поверхности
деформированных частиц, а пунктиром – поверхности, какими они были бы при
отсутствии деформации.
Результирующая сила Fij
передаваемая через пятно контакта от одной частицы на другую, состоит из
нормальной компоненты Fn , действующей вдоль общей нормали в точке
C, и тангенциальной компоненты Ft , действующей в плоскости контакта
P. Тангенциальные компоненты не влияют на нормальные компоненты движения, если
упругие свойства материалов двух тел одинаковы.
Даже для разных материалов это
влияние мало и им можно пренебречь. Таким образом, можно записать, что
![]() (1)
(1)
![]() (2)
(2)
Где ![]() - относительное нормальное смещение частиц,(сжатие в нормальном
направлении),
- относительное нормальное смещение частиц,(сжатие в нормальном
направлении), ![]() - нормальная
компонента относительной скорости,
- нормальная
компонента относительной скорости, ![]() - относительное
тангенциальное смещение частиц (упругое тангенциальное смещение точки
контакта),
- относительное
тангенциальное смещение частиц (упругое тангенциальное смещение точки
контакта), ![]() - тангенциальная
компонента относительной скорости.
- тангенциальная
компонента относительной скорости.
Тангенциальная сила целиком
обусловлена силами трения, поэтому для случая отсутствия трения между
поверхностями частиц касательные и вращательные движения нечувствительны к
контакту. При наличии трения тангенциальная сила приводит к появлению момента
вращения, действующего относительно центров масс частиц и изменяющего их
угловые скорости.
Кроме того, поскольку пятно
контакта имеет конечные размеры, становиться возможной передача дополнительно к
силам еще и результирующего момента. Две составляющие этого момента,
действующие в плоскости контакта, называются моментами качения и предопределяют
сопротивление движению относительного перекатывания контактирующих тел,
называемого трением качения, величина которого в большинстве практических задач
мала, для того, чтобы им пренебречь.
Третья компонента результирующего
момента действует относительно общей нормали и называется моментом верчения.
Момент верчения не учитывается в большинстве моделей сыпучих сред , вследствие
минимального влияния на массовое поведение сыпучей среды при значительной
вычислительной стоимости процедуры его расчета.
Далее рассмотрим вычисление
параметров контакта, необходимых для расчета нормальной и тангенциальной
компоненты силы взаимодействия.
Нормальное сжатие частиц будем
определять как перекрытие их недеформированных поверхностей ![]() .
.
![]() (3)
(3)
Мы будем рассматривать задачу
передачу усилия от частицы j на частицу i то есть действие силы Fij будет направлено от j на i. Поскольку
![]() ,
,
соблюдение порядка следования
частиц необходимо для обеспечения правильной ориентации различных векторов.
Определим нормаль контакта nij как единичных вектор, ортогональный
плоскости Р,
 (4)
(4)
Тогда относительная скорость
частицы j относительно i в точке контакта будет равна:
![]() (5)
(5)
Нормальная компонента
относительной скорости запишется в виде:
![]() (6)
(6)
При этом Vn >0 при сближении частиц (стадия нагружения).
Таким образом, нормальный контакт
двух упругих частиц может быть представлен как взаимодействие посредством
параллельно соединенных элементов упругости и вязкости. Модель тангенциального
контакта строиться аналогично, но с добавлением элемента скольжения.
Литература
1.
Численное
исследование актуальных проблем машиностроения и механики сплошных и сыпучих
сред методом крупных частиц / Под ред. Ю.М.Давыдова. – М.: Национальная
Академия прикладных наук, Международная ассоциация разработчиков и
пользователей метода крупных частиц, 1995 . – Т.2. - С. 573.
2.
Урьев, Н.Б. Физико-химические основы технологии дисперсных систем и
материалов /Н.Б.Урьев. – М.: Химия, 1988. – 256 с.
3.
Jatsun
Sergey, Safarov Jamil. Mathematical model of granular material in a vibrating
boiling layers. EUROMECH Colloquium 425. 2001. Aberdeen. Scotland.
4.
Jatsun
S., Safarov J. Vibrating engine for
robots. Proceedings. CLAWAR 2000. Madrid.P.1016-1021.
Поступила в редакцию 04.02.2011 г.