Адаптивные схемы контроля
Павлик Анна Владимировна,
соискатель Национального аэрокосмического университета им. Н.Е. Жуковского «Харьковского авиационного института», Украина.
Постановка проблемы
Эффективность функционирования цифровых систем может быть достигнута путем своевременного обнаружения отказавших элементов и их восстановления. Для этого необходимо иметь сведения о состоянии аппаратуры системы, о качестве переработки, хранения и передачи в ней информации. Обнаружение ошибок и исключение их влияния особенно важно для цифровых систем, работающих в реальном масштабе времени.
Анализ последних исследований и публикаций
Для оперативного обнаружения ошибок используется функциональное диагностирование, которое осуществляется в процессе непосредственного использования объекта контроля по назначению, когда на него поступают только рабочие воздействия, предусмотренные алгоритмом функционирования объекта. Анализ современных методов функционального диагностирования показывает, что наиболее эффективными оказываются методы и средства, ориентированные на сравнительно узкие классы дискретных устройств. Одним из таких классов являются комбинационные устройства (КУ).
Для функционального контроля КУ применяются методы дублирования, восстановления значений входных переменных [1], контролирующие коды [2] и др. Указанные методы отличаются по сложности реализации, а некоторые не всегда применимы. Например, не для всех КУ можно построить обратный многополюсник. К сожалению, в настоящее время отсутствуют эффективные методы построения схем функционального контроля КУ.
Цель работы: разработать метод функционального контроля комбинационных устройств на основе адаптивных схем контроля.
Основные результаты исследований
Разработанный метод функционального контроля КУ является развитием метода, описанным автором в работе [3]. Основные положения метода состоят в следующем.
Рассматривается КУ с n входами, значения которых описываются множеством X={x1,…,xn} и k выходами, значения которых описываются множеством логических функций Y = {y1(X),…,yk(X)}. Обозначим множество различных выходных слов Y*={Y1,…,Ys}. Разобьем множество входных слов (наборов) X* на подмножества X1,…,Xs, называемых группами. К одной группе относятся входные слова, которым соответствуют одинаковые выходные слова. Тогда если XÎXi то Y=Yi и если Y=Yi, то XÎXi. Количество слов в группах обозначим L = {l1,…, ls}. Между группами входных слов Х* и множеством выходных слов Y* установлено взаимно однозначное соответствие Xi «Yi , i = 1,…, s.
Проверка Р определяет соответствия между соответствующими подмножествами множеств X* и Y*. Множество А= {а1,…, аs}, называемое составом проверки, указывает какие соответствия проверяются.
Проверка Р с составом А разбивает множества X* и Y* на подмножества:
X* = X1 È X0; X1 = {X11,…, X1r}; X0 = {X01,…,X0s-r};
Y* = Y1 È Y0; Y1 = {Y11,…, Y1r}; Y0 = {Y01,…,Y0s-r};
и определяет соответствие между элементами подмножеств X1 и Y1
![]() .
.
С учетом состава Ai проверки Pi можно записать:
![]()
В результате неисправностей в схеме КУ на его выходах при входном слове ХÑ формируется ошибочное слово YÑ. i –ая проверка с составом Ai обнаруживает ошибку, если XÑÎ X*(Ai) и YÑÏY*(Ai) или YÑÎY*(Ai) и XÑÏ X*(Ai).
Логическая функция, описывающая i - ю проверку имеет вид:
Zi=Hi(X) Å Qi(Y),
Hi(X) - логическая функция от переменных x1,…,xn, принимающая значение «1» на наборах X1i;
Qi(Y) - логическая функция от переменных y1(X),…,yk(X), принимающая значение «1» на наборах Y1i.
В работе [3] описана схема контроля, которая реализует все выбранные проверки. Для уменьшения сложности схемы контроля предлагается строить адаптивную схему контроля [4], приведенную на рис. 1.
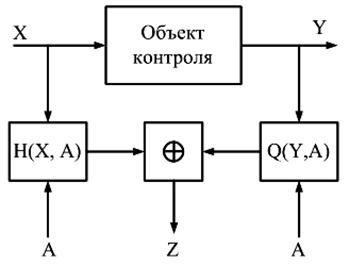
Рис. 1. Адаптивная схема контроля.
Адаптивная схема контроля содержит функциональные преобразователи H(X,A) и Q(Y,A), которые, в зависимости от заданного состава формируют соответствующие контрольные соотношения. Методика построения функциональных преобразователей описана в работе [5]. При работе адаптивной схемы контроля происходит временное разделение функциональных проверок. Составы проверок формируются последовательно для каждого такта проверок.
Анализ приведенной адаптивной схемы контроля показывает, что она имеет более простую сложность реализации (программную или аппаратную).
Заключение
Предложенный метод функционального контроля комбинационных устройств на основе адаптивных схем контроля, основанный на выборе рационального состава проверок и их последовательной реализации, позволяет уменьшить сложность системы контроля. Дальнейшее направление исследований – разработка алгоритмического и программного обеспечения для автоматизации процесса построения функциональных преобразователей.
Литература
1. Isermann R. Model-based fault detection and diagnosis. Status and applications / R. Isermann // Annual Reviews in Control. - 2005. - V. 29.- P. 71-85.
2. Kleer J. D. Fundamentals of model-based diagnosis / J. Kleer, J. Kurien // Proc. Safeprocess 03, Washington, U.S.A. - 2003. - P. 25-36.
3. Кошевой Н.Д., Павлик А.В. Функциональный контроль комбинационных устройств/ Радіоелектронні і комп’ютерні системи. – 2013. - № 1(57). С. 45 - 49.
4. Павлик Г.В., Кошовий М.Д. Автоматизована система контролю/Патент України № 76138, МПК G06F11/30. Заявл. 05.06.2012; Опубл. 25.12.2012, Бюл. №24.
5. Доценко Н.В., Павлик А.В., Аникин И.Н. Настраиваемые алгоритмические преобразователи для адаптивных систем/ Матеріали міжнародної науково-практичної конференції «Наукові дослідження – теорія та експеримент «2005». - Полтава: Полт. НТУ ім. Ю.Кондратюка, 2005. - Т.11. – С. 17-19.
Поступила в редакцию 06.06.2013 г.