Модельные исследования точности локации микросейсмических источников с помощью модифицированного корреляционного алгоритма
Шмаков Федор Дмитриевич,
старший научный сотрудник научно-исследовательского института прикладной информатики и математической геофизики Балтийского федерального университета им. И. Канта,
Родин Сергей Валентинович,
генеральный директор ООО «Антел-нефть»,
Сисембаев Куаныш Джолжанович,
директор ТОО «CSP MUNAY SERVICES».
The model study of the accuracy of microseismic sources location using a modified correlation algorithm
F.D. Shmakov,
Institute of Applied Informatics and Mathematical Geophysics, Immanuel Kant Baltic Federal University,
S.V. Rodin,
general manager “Antel-oil”, Ltd,
K.D. Sisembaev,
director «CSP MUNAY SERVICES», ТОО.
В статье рассматривается задача статистического оценивания латеральных координат микросейсмических источников при воздействии техногенных помех, регистрируемых поверхностной системой наблюдений в процессе производства гидравлического разрыва пласта. Представлены результаты модельных исследований точности локации источников с помощью модифицированного корреляционного алгоритма.
Ключевые слова: микросейсмический мониторинг, гидравлический разрыв пласта, локация, обратная кинематическая задача, алгоритм.
In this paper we consider the problem of statistical estimation of the lateral coordinates of microseismic sources under the influence of strong industrial noise, recorded by surface observation system during hydraulic fracturing. The results of model studies of the accuracy of microseismic sources location using a modified correlation algorithm are presented.
Keywords: microseismic monitoring, hydraulic fracturing, location, inverse kinematic problem, algorithm.
Право использования и публикации данных материалов получено у ООО «Антел-нефть» г. Москва и TOO «CSP MUNAY SERVICES» г. Астана.
В настоящее время в практику производства гидравлического разрыва пласта (ГРП) широко внедряются методы пассивного микросейсмического мониторинга, которые применяются для решения задачи контроля и оценки эффективности техногенного воздействия. Основу методов составляют алгоритмы пассивной локации источников микросейсмической эмиссии, возбуждаемых в процессе производства ГРП. На основе обработки регистрационных записей системы наблюдений определяется местоположение источников микроземлетрясений, возбуждаемых при закачке рабочей жидкости в пласт, т.е. определяются места локальных разрывов среды, генерирующих сейсмические волны. В процессе мониторинга ГРП осуществляется накопление информации о местоположении источников микросейсмических событий, что позволяет определить геометрические размеры и направление образовавшейся трещины или системы трещин гидроразрыва [1].
В методах микросейсмического мониторинга с реализацией системы наблюдений на дневной поверхности применяются различные конфигурации многоканальных сейсмических антенн. В работах [2, 3] рассмотрены основные алгоритмы, которые используются в настоящее время в поверхностных методах мониторинга, а также предложен ряд алгоритмов, позволяющих решать задачи микросейсмического мониторинга ГРП с учетом воздействия сильных техногенных сейсмических помех. В подтверждение этому авторы работ представляют результаты модельных экспериментов, которые позволяют сравнить “качество” различных алгоритмов посредством определения неизвестных параметров источников (координат и механизмов их действия) при воздействии реальных помех, регистрируемых на дневной поверхности в процессе производства ГРП. Далее в работе будем рассматривать задачу статистического оценивания латеральных координат источников по данным поверхностной системы наблюдений.
Сравнение алгоритмов в работах [2, 3] осуществлялось с помощью статистического метода повторных независимых испытаний Монте-Карло. Вычислительный эксперимент заключался в многократном определении координат источника по модельным многоканальным сейсмограммам. Для расчета синтетических сейсмограмм использовалась поверхностная система наблюдений, применявшаяся при мониторинге ГРП на одном из месторождений углеводородов (УВ). Источник излучения – фрагмент сейсмограммы реального сейсмического источника с заданными параметрами, модель среды – горизонтально слоистая. К модельным сейсмограммам аддитивно добавлялись техногенные сейсмические помехи различной интенсивности. В качестве реализации помех выбирались фрагменты регистрационных записей поверхностной системы наблюдений при производстве ГРП. Полученные таким образом сейсмограммы обрабатывались с помощью различных алгоритмов.
Результатом расчетов для каждого алгоритма являлись наборы оценок координат источника, по которым вычислялись статистические характеристики точности определения его местоположения. В качестве одного из статистических критериев сравнения алгоритмов рассматривался критерий СКО – среднеквадратического отклонения оценок координат источника от их истинного местоположения.
В работах [2, 3] рассмотрен алгоритм локации, который составляет основу метода микросейсмического мониторинга процесса ГРП залежи УВ [4]. Для данного алгоритма приводится значение среднеквадратической ошибки локации, которое составляет порядка 26 метров для отношения сигнал/шум равного 0.1 (по энергии).
В работе [5] предложен подход, позволяющий увеличить достоверность локации источников в методе микросейсмического мониторинга процесса ГРП залежи УВ. Рассматривается модифицированный корреляционный алгоритм, который представляет собой синтез исходного алгоритма и алгоритма эмиссионной томографии.
В данной работе представлены результаты модельных исследований точности локации источников с помощью модифицированного корреляционного алгоритма. Основу исследований составляет рассмотренный выше вычислительный эксперимент. Результатом моделирования являются значения среднеквадратических отклонений оценок латеральных координат источника от их истинных значений, средних значений количества коррелирующих каналов и длительности микросейсмических событий в зависимости от отношения сигнал/шум.
Отметим, что в данном случае коэффициент корреляции каналов означает количество и набор каналов сейсмической антенны, на которых получено решение обратной кинематической задачи (ОКЗ), т.е. координаты местоположения источника. Длительность микросейсмического события – количество отсчетов регистрационных записей, на которых найдено соответствующее решение ОКЗ [5].
Для
моделирования была взята поверхностная система наблюдений, применявшаяся при
мониторинге ГРП на месторождении Узень, Республика Казахстан. Схема расстановки
45 канальной сейсмической антенны представлена на Рисунке 1. Центр координат –
проекция источника на горизонтальную плоскость XY (X – Запад-Восток, Y – Юг-
Север). Координаты местоположения источника: ![]() м.
м.
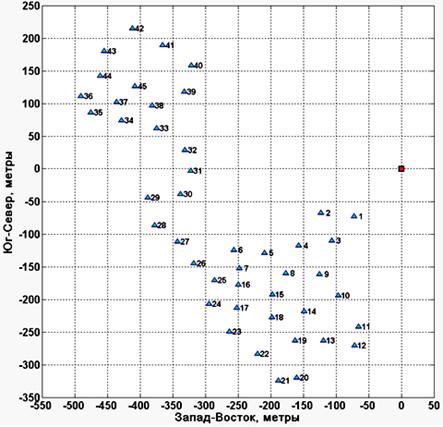
Рис. 1. Схема наблюдений на месторождении.
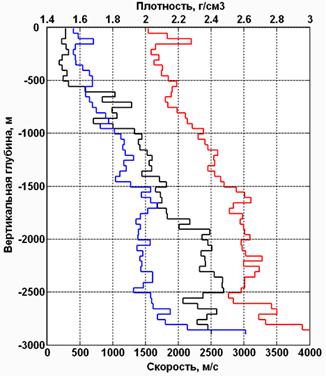
Рис. 2. Параметры среды месторождения УВ. Интервальные скорости продольных (красный цвет) и поперечных волн (синий цвет), плотность (черный цвет).
В модельном эксперименте рассматривается горизонтально слоистая модель среды. Параметры среды были взяты из данных вертикального сейсмического профилирования месторождения УВ. На Рисунке 2 представлены параметры среды месторождения УВ: интервальные скорости продольных и поперечных волн, плотность.
В качестве модели источника рассматривается точечный источник типа центр расширения, который излучает сферическую продольную волну, распространяющуюся во всех направлениях. Для моделирования импульсного источника типа центр расширения используется импульс Рикера, с несущей частотой в источнике 45 Гц. Временная функция в источнике задается формулой:
![]() ,
,
где ![]() – несущая частота в источнике,
– несущая частота в источнике, ![]() – время. Этот выбор основан на результатах
локации источников перфорационных взрывов в скважине для рассматриваемого месторождения.
Подробное описание характеристик сигнала от перфорации представлено в работе [5].
– время. Этот выбор основан на результатах
локации источников перфорационных взрывов в скважине для рассматриваемого месторождения.
Подробное описание характеристик сигнала от перфорации представлено в работе [5].
Для численного моделирования процесса распространения сейсмических волн от источника применяется схема Вирье [6]. Для каждой точки наблюдения производится расчет синтетических сейсмограмм по заданным параметрам источника и свойствам среды, аналогичным свойствам среды реального месторождения УВ. На Рисунке 3 представлен фрагмент синтетической сейсмограммы в одной из точек наблюдения. На сейсмограмме помимо сигнала от источника присутствуют сигналы, отраженные от нижележащих слоев.
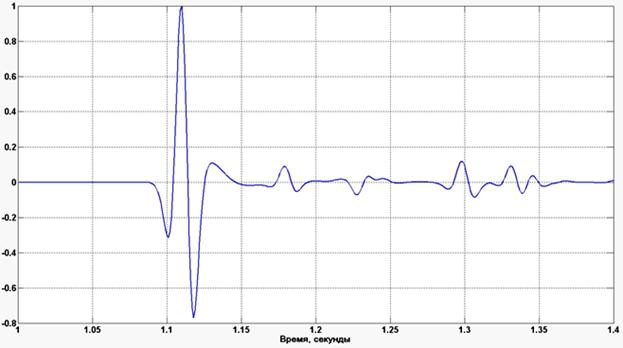
Рис. 3. Синтетическая сейсмограмма в точке наблюдения.
Для расчета теоретических временных задержек сигнала от источника в точках наблюдения реализован лучевой метод на основе принципа Ферма и закона Снелиуса. На Рисунке 4 представлен результат расчета траектории лучей до рефракции по данным ВСП. На рисунке также изображены изолинии средних скоростей продольных волн, рассчитанные по лучам.
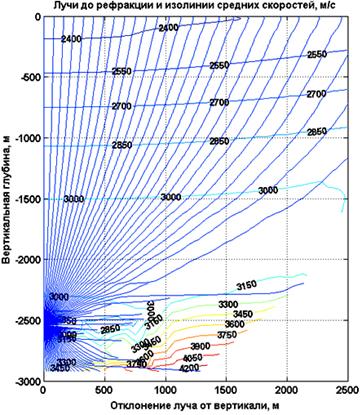
Рис. 4. Расчет лучей по данным ВСП.
В вычислительном эксперименте на рассчитанные многоканальные синтетические сейсмограммы аддитивно накладывались реальные сейсмические помехи различной интенсивности. В качестве реализаций помех выбирались реальные шумы на месторождении Узень, регистрируемые поверхностной системой наблюдений при производстве ГРП. На Рисунке 5 представлен 10 секундный фрагмент записей сейсмических шумов. Трассы каналов нормированы на абсолютный максимум рассматриваемого фрагмента регистрационных записей. Как видно из рисунка мощность сигнала на каналах сейсмической антенны не одинакова, что связано с различным расстоянием установки датчиков сейсмической антенны относительно устья скважины.
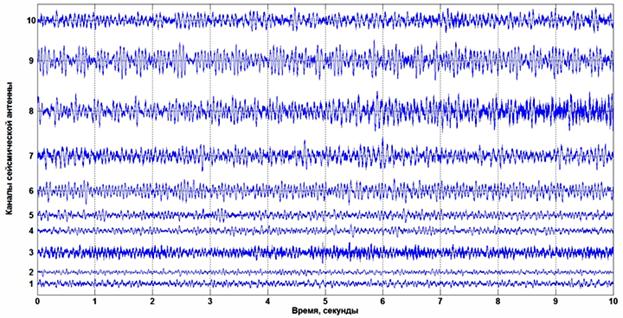
Рис. 5. Записи шумов на каналах сейсмической антенны при производстве ГРП.
Рассчитанные синтетические сейсмограммы смешивались с различными фрагментами регистрационных записей ГРП. Для того чтобы испытания в вычислительном эксперименте можно было считать статистически независимыми, временные интервалы помех выбирались таким образом, чтобы соответствующие интервалы не пересекались.
Аналогично работам [3, 4] среднеквадратические значения фрагментов 45-канальной записи помех при их суммировании с синтетическими сейсмограммами нормировались таким образом, чтобы обеспечить заданное усредненное по всем 45 каналам отношение сигнал/шум. В качестве отношения сигнал/шум рассматривалось отношение сумм модулей временных отсчетов сигнала и помехи на соответствующих временных интервалах:
 ,
,
где ![]() – значения амплитуд соответственно
сигнала и помехи на
– значения амплитуд соответственно
сигнала и помехи на ![]() -ом временном отсчете. Также
можно рассмотреть отношение по энергии сигнала и помехи, когда суммируются
квадраты значений временных отсчетов.
-ом временном отсчете. Также
можно рассмотреть отношение по энергии сигнала и помехи, когда суммируются
квадраты значений временных отсчетов.
В вычислительном эксперименте отношение сигнал/шум варьировалось в диапазоне от 1/0.1 до 1/10 (по амплитудам) с шагом 0.1 для среднеквадратических значений шума. Для каждого соотношения сигнал/шум было получено 100 различных фрагментов 45-канальных сейсмограмм. Обработка каждого фрагмента 45-канальной сейсмограммы осуществлялась с использованием модифицированного корреляционного алгоритма локации [5].
В качестве примера на Рисунке 6 представлен результат обработки 100 фрагментов 45-канальной сейсмограммы для отношения сигнал/шум равного 1/3 по амплитудам, что примерно соответствует соотношению 1/10 по энергии. На рисунке в виде красных кругов изображены оценки местоположения источника. Размер круга пропорционален среднему значению коэффициента корреляции каналов для соответствующего фрагмента 45-канальной сейсмограммы.
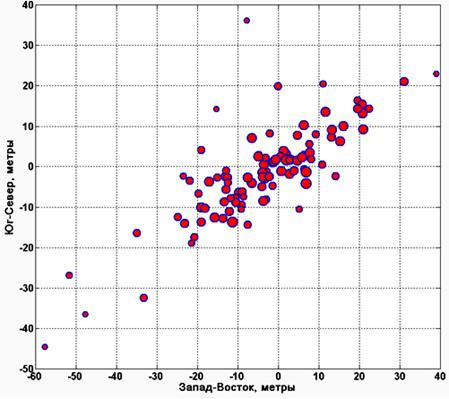
Рис. 6. Оценки местоположения источника по 100 реализациям шума для соотношения сигнал/шум равного 1/3.
По полученным оценкам координат источника среднеквадратическая ошибка определения местоположения источника составила порядка 16 метров, средние значения коэффициента корреляции каналов 30 и длительности микросейсмического события 33 отсчета. Можно говорить, что полученное значение среднеквадратической ошибки соответствует оценке, приведенной в работе [2] для отношения сигнал/шум равного 0.1 по энергии. Тем не менее, сравнивать данные результаты не совсем корректно, поскольку реализация алгоритмов, параметры системы наблюдения, среды, источника и помех существенно различаются.
По результатам вычислительного эксперимента для каждого соотношения сигнал/шум рассчитаны значения среднеквадратического отклонения оценок латеральных координат источника от их истинных значений, средних значений коэффициента корреляции каналов и длительности микросейсмического события. На Рисунке 7 представлены графики значений среднеквадратической ошибки определения местоположения источника, коэффициента корреляции каналов и длительности микросейсмического события в зависимости от отношения сигнал/шум.
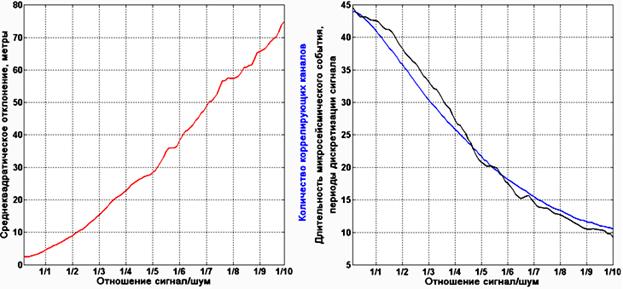
Рис. 7. Среднеквадратическое значение ошибки, количество коррелирующих каналов и длительность микросейсмического события в зависимости от отношения сигнал/шум.
Полученные зависимости дают возможность оценить для заданной поверхностной системы наблюдения ожидаемую точность локации, средние значения количества коррелирующих каналов и длительности микросейсмического события при известном отношении сигнал/шум. Как можно видеть из представленных графиков с увеличением влияния помех ошибка определения местоположения источника растет, а значения коэффициента корреляции каналов и длительности микросейсмического события соответственно уменьшаются.
Выводы
Модельные исследования позволили определить статистические характеристики ошибок определения местоположения источника, допускаемого модифицированным корреляционным алгоритмом. Результаты вычислительного эксперимента позволяют оценить ожидаемую точность локации, средние значения количества коррелирующих каналов и длительности микросейсмического события при заданных параметрах системы наблюдения, источника и модели среды с учетом реальных сейсмических помех, регистрируемых поверхностной системой наблюдения в процессе производства ГРП.
Литература
1. Кушнир А.Ф., Рожков М.В., Тагизаде Т.Т. Способ измерения координат микросейсмических источников: Патент 2451307 Российская Федерация, МПК7 G01V1/28; заявитель и патентообладатель ЗАО Научно-инженерный центр «СИНАПС» №2011129540/28; заявл. 18.07.2011; опубл. 20.05.2012, Бюл. №14.
2. Варыпаев А.В. Синтез статистических алгоритмов определения параметров микросейсмических источников по записям малоапертурной группы // Естественные и технические науки. – 2012. – №12. – С. 21-36.
3. Кушнир А.Ф., Варыпаев А.В., Рожков М.В., Епифанский А.Г., Дрикер И. Определение параметров очагов микросейсмических событий по данным поверхностных сейсмических групп при сильных коррелированных помехах и сложных механизмах источников излучения // Физика Земли. – 2014. – №3. – С. 28-50.
4. Ерохин Г.Н., Майнагашев С.М., Бортников П.Б., Кузьменко А.П., Родин С.В. Способ контроля процесса гидроразрыва пласта залежи УВ // Патент РФ № 2319177. Опубликован 10.09.2008, бюллетень №7.
5. Шмаков Ф.Д. Совершенствование метода микросейсмического мониторинга процесса ГРП залежи УВ: Модифицированный корреляционный алгоритм локации // Приволжский научный вестник. – 2014. – №8(36). – С. 12-20.
6. Virieux J. P-SV wave propagation in heterogeneous media: Velocity-stress finite difference method // Geophysics. – 1986. – №51. – P. 889-901.
Поступила в редакцию 21.07.2014 г.